June 30, 2023

In June 2023, CREATE and HuskyADAPT co-hosted a showcase — and celebration — of outstanding UW research on accessible technology.
The showcase featured poster presentations, live demonstrations by our faculty, students, and researchers. Over 100 attendees viewed 25 projects, presentations, and posters.
Congratulations and appreciation to CREATE Engagement and Partnerships Manager Kathleen Quin Voss and HuskyADAPT Student Executive Chair Mia Hoffman for putting on an amazing research showcase!








Accessible card games: Switch scanning-enabled card holder and dispenser
Project lead: Katrina Ma
While playing card games, individuals with motor disabilities or limited hand and finger use experience a lack of confidentiality, frustration having to depend on a caregiver, and difficulty connecting with other players. Our team aims to create a simple, universal, user-friendly, and affordable device that allows individuals with motor disabilities to independently hold and play cards.
Read more about Accessible card games...
Our idea is to incorporate switch-scanning technology in a device that can hold up to twelve cards and allow the user to dispense a chosen card to other players at the click of a switch. The device has a universal jack to accommodate users' own switches.
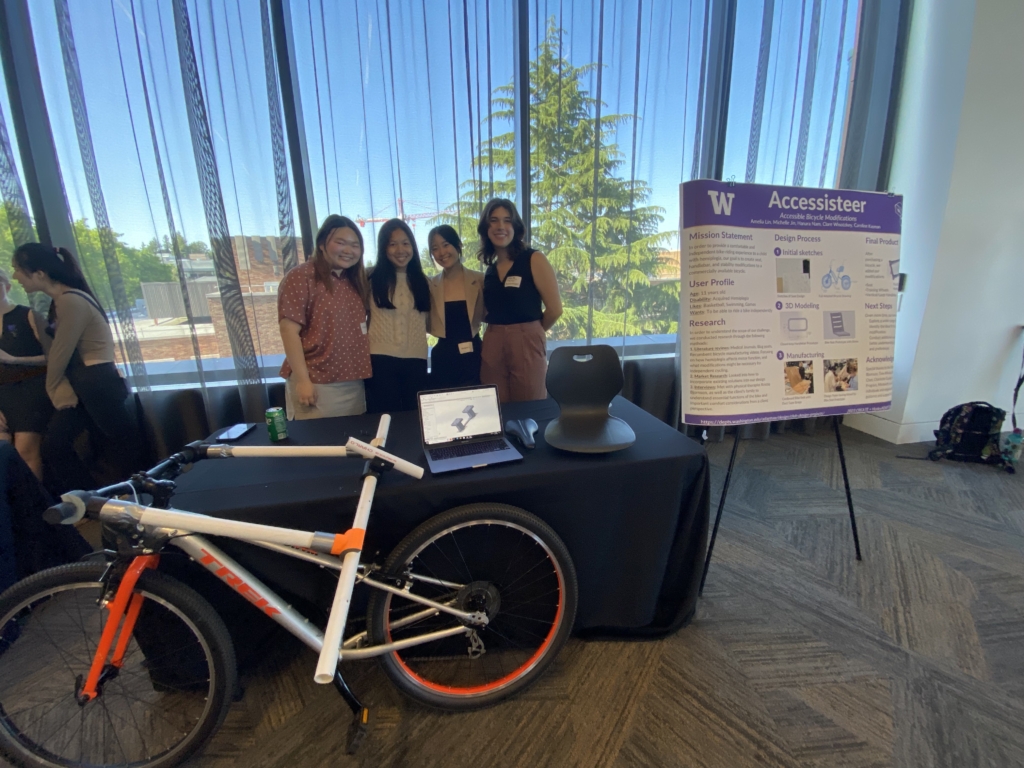
Accessisteer
Project lead: Michelle Jin
In order to provide a comfortable bike-riding experience to a child with hemiplegia, our mission is to create seat, handlebar, and stability modifications to a commercially available bicycle. This allows for cycling without the need for external assistance.
Adapted Ride-on Car+
Project lead: Mia Hoffman
Early self-initiated mobility is fundamental to a young child’s development. Adapted ride-on cars (ROCs) are an affordable alternative mobility option for young children with disabilities. We will be investigating the impact that control types has on a child’s directional control and engagement during play using ROCs that are joystick-controlled and manually steered.
Read more about Adapted Ride-on Car+
Current ROCs depend on manual steering, which results in steering being difficult for a young child, especially with limited motor function. Modifications for ROCs that allow for joystick control are now becoming available, allowing the child to use a joystick for steering. We will be investigating the impact that control types has on a child’s directional control and engagement during play using ROCs that are joystick-controlled and manually steered. To quantify the child’s device interaction, we have developed a custom data logger, the ROC+, using an Ardunio Nano 33 IoT. The data logger measures switch activation for the traditional ROC, steering wheel rotation or joystick position, wheel rotation, acceleration, and angular velocity. We can also measure when an adult has taken control of the device using a remote control. The ROC+ will be used in a forthcoming study to quantify a child’s driving ability and the relationship between a parent and a child while a child is learning to use a powered mobility device.
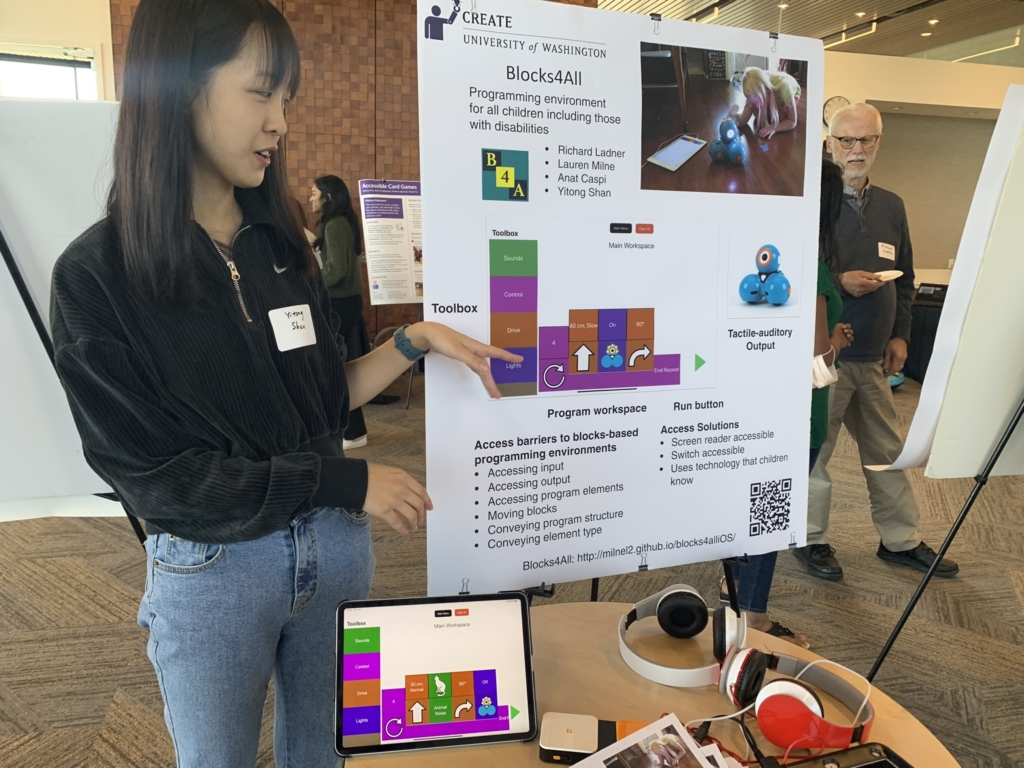
Blocks4All: A screen reader and switch accessible block-based programming environment
Project lead: Yitong Shan
Blocks4All is a block-based programming environment for all children including those with disabilities. It is accessible with VoiceOver, Switch Control, and Voice Control. Children can learn beginning programming concepts by placing blocks on the app to control the Dash robot.
Chronically Under-Addressed: Considerations for HCI Accessibility Practice with Chronically Ill People
Project lead: Kelly Mack and Emma McDonnell
Accessible design and technology could support the large and growing group of people with chronic illnesses. However, human computer interactions (HCI) has largely approached people with chronic illnesses through a lens of medical tracking or treatment rather than accessibility. We describe and demonstrate a framework for designing technology in ways that center the chronically ill experience.
Read more about Chronically Under-Addressed...
First, we identify guiding tenets: 1) treating chronically ill people not as patients but as people with access needs and expertise, 2) recognizing the way that variable ability shapes accessibility considerations, and 3) adopting a theoretical understanding of chronic illness that attends to the body. We then illustrate these tenets through autoethnographic case studies of two chronically ill authors using technology. Finally, we discuss implications for technology design, including designing for consequence-based accessibility, considering how to engage care communities, and how HCI research can engage chronically ill participants in research.
Cultivating inclusive play and maker mindset among neurodiverse children in a preschool classroom
Project lead: Maitraye Das
Young neurodivergent children need equitable opportunities to co-engage in high quality learning activities alongside neurotypical peers from early childhood. While there has been critical movement toward increasing participation of neurodivergent children in classrooms, much of this work involve school-age kids (6 years or over), leaving open questions around how neurodivergent preschoolers of age 3-5 years might engage in collaborative play with and around technologies.
Read more about Cultivating Inclusive Play...
We aim to understand whether and how programmable toy robots (e.g., KIBO) can foster inclusive play and maker mindset among neurodiverse children in preschool classrooms.
We partnered with the Experimental Education Unit (EEU) at the UW Haring Center. We conducted our research in two preschool classrooms, each including 16 children between the ages of 3-5. Six to eight children in each classroom have neurodevelopmental conditions including autism, developmental delays, and speech difficulties. Our research activities center around supporting children in making and interacting with the toy robot called KIBO. Preliminary findings show that through careful and accessible adaptation of activities, KIBO could enhance understanding of cause of effect, trial and error, enthusiasm for making and imagination, and sense of collaboration (and at times competition and negotiation) among neurodiverse groups of children.
Design Principles for Robot-Assisted Feeding in Social Contexts
Project lead: Amal Nanavati
- Robot-Assisted Feeding paper
- Robot-Assisted Feeding poster
- Video: Design Principles
- Video: Robot-Assisted Feeding Gone Wrong
Social dining is a meaningful and culturally significant experience. For 1.8 million Americans with motor impairments who cannot eat without assistance, challenges restrict them from enjoying this social ritual. In this work, we identify the needs of participants with motor impairments during social dining and how robot-assisted feeding can address them.
Read more about Robot-Assisted Feeding
Following a community-based participatory research method, we worked with a community researcher with motor impairments throughout this study. We contribute (a) insights into how a robot can help overcome challenges in social dining and (b) design principles for creating robot-assisted feeding systems to facilitate meaningful social dining.
Easier or Harder, Depending on Who the Hearing Person Is”: Codesigning Videoconferencing Tools for Small Groups with Mixed Hearing Status
Project lead: Emma McDonnell
- Codesigning Videoconferencing Tools paper
- Codesigning Videoconferencing Tools poster
- Video: CHI presentation
With improvements in automated speech recognition and increased use of videoconferencing, real-time captioning has changed significantly. This shift toward broadly available but less accurate captioning invites exploration of the role hearing conversation partners play in shaping the accessibility of a conversation to d/Deaf and hard of hearing (DHH) captioning users.
Read more about Easier or Harder...
While recent work has explored DHH individuals’ videoconferencing experiences with captioning, we focus on established groups’ current practices and priorities for future tools to support more accessible online conversations.
Our study consists of three codesign sessions, conducted with four groups (17 participants total, 10 DHH, 7 hearing). We found that established groups crafted social accessibility norms that met their relational contexts. We also identify promising directions for future captioning design, including the need to standardize speaker identification and customization, opportunities to provide behavioral feedback during a conversation, and ways that videoconferencing platforms could enable groups to set and share norms.
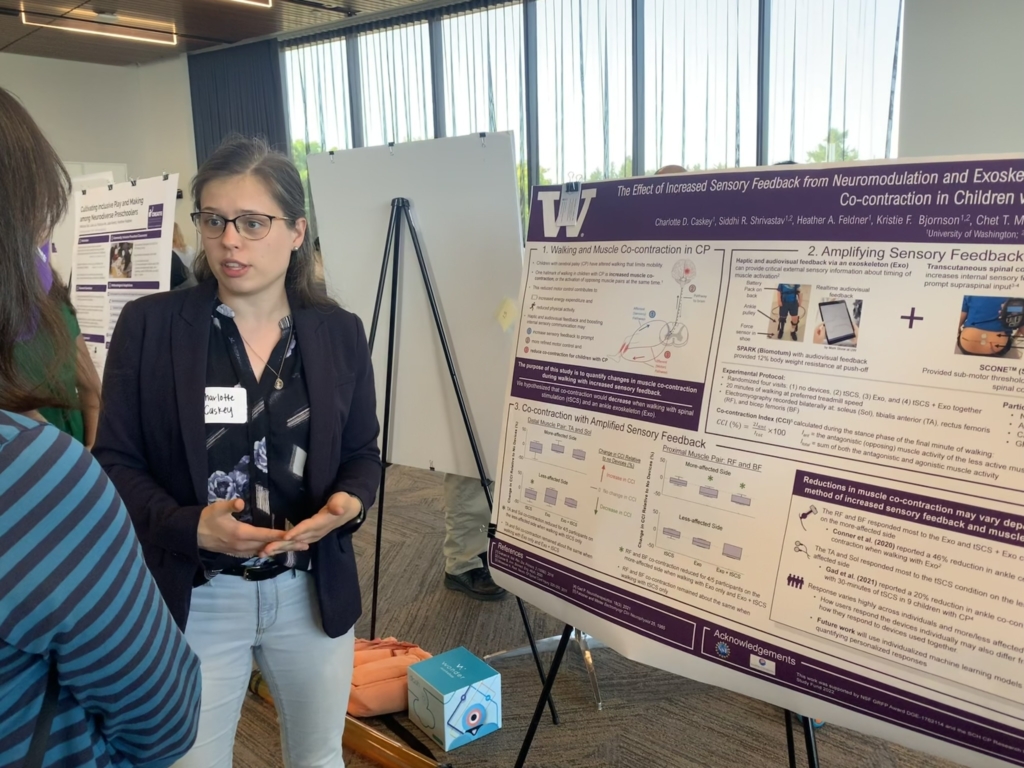
The Effect of Increased Sensory Feedback from Neuromodulation and Exoskeleton use on Ankle Co-contraction in Children with Cerebral Palsy
Project lead: Charlotte Caskey
Children with cerebral palsy (CP) have altered gait that limits mobility through the activation of antagonistic muscle pairs simultaneously. This study will quantify changes in muscle co-contraction during walking with two devices that increase sensory feedback.
Read more about The Effect of Increased Sensory Feedback...
Children with cerebral palsy (CP) have altered gait that limits mobility. One hallmark of CP gait is increased muscle co-contraction, or the activation of antagonistic muscle pairs at the same time.This may contribute to increased energy expenditure and reduced physical activity for children with CP. Amplifying sensory feedback may help combat this by prompting more refined motor control and lead to reduced co-contraction with CP. The purpose of this study is to quantify changes in muscle co-contraction during walking with two devices that increase sensory feedback: an ankle exoskeleton with audiovisual feedback (Exo) and transcutaneous spinal cord stimulation (tSCS). The Exo provides increased haptic feedback targeting external sensory information while tSCS boost neural communication internally. We hypothesized that co-contraction would decrease when walking with spinal stimulation and the ankle exoskeleton. We compared changes in co-contraction of the biceps femoris and rectus femoris (BF/RF) and the tibialis anterior and soleus (TA/Sol) with 1) no devices, 2) Exo only, 3) tSCS only, and 4) Exo+tSCS for 5 children with CP. We found that tSCS only led to the greatest reduction in TA/Sol co-contraction but Exo only and Exo+tSCS led to the greatest reductions in BF/RF co-contraction. This work is fundamental in helping us understand how children with CP respond within a single session of using these devices and how the devices might be used for longer term rehabilitation.
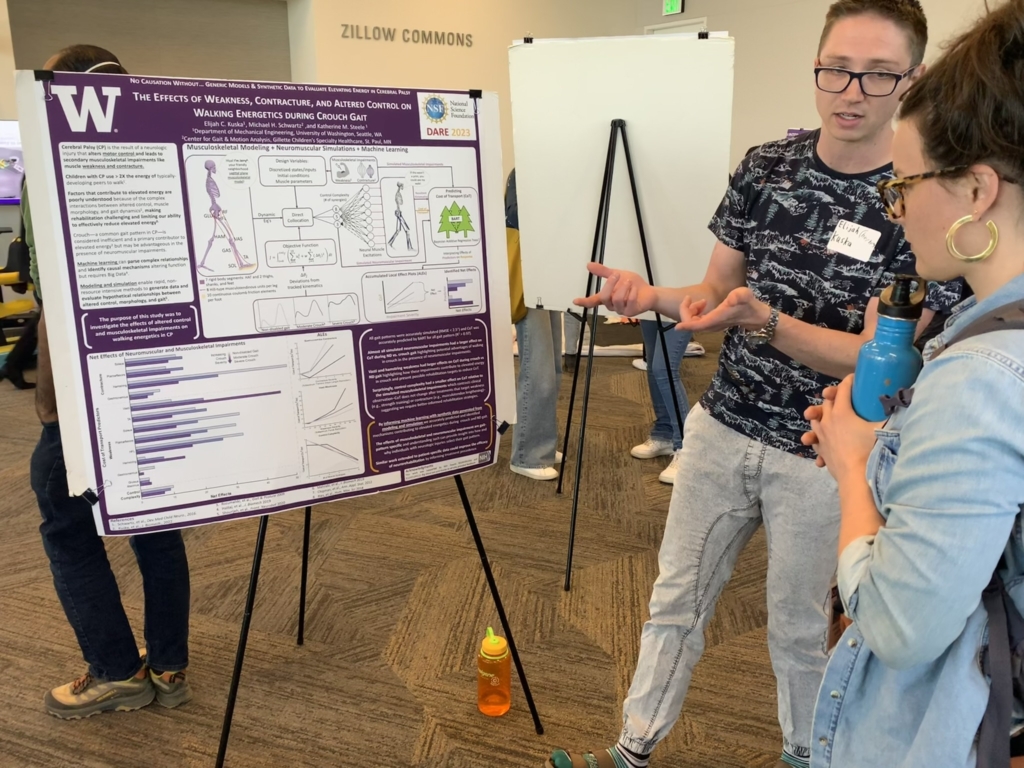
The Effects of Weakness, Contracture, and Altered Control on Walking Energetics During Crouch Gait
Project lead: Elijah Kuska
Cerebral palsy (CP) is the result of a pediatric brain injury that primarily alters control. However, individuals with CP often develop progressive, secondary impairments like weakness and contracture. Multi-modal impairments-that of control and morphology-impose complex restrictions on mobility and elevate energetics. This study seeks to utilize modeling, simulation, and machine learning to parse the relative effects of multi-modal impairments during non-disabled and CP gait, identifying the primary impairment driving elevated energetics.
Evaluating Customization of Remote Tele-operation Interfaces for Assistive Robots
Project lead: Vinitha Ranganeni
- Evaluating Customization poster
- Evaluating Customization paper
- Videos: Starting percussive vest | Self-feeding eggs | Light switch
Mobile manipulator platforms, like the Stretch RE1 robot, make the promise of in-home robotic assistance feasible. For people with severe physical limitations, like those with quadriplegia, the ability to tele-operate these robots themselves means that they can perform physical tasks they cannot otherwise do themselves, thereby increasing their level of independence.
Read more about Tele-operated Interfaces for Assistive Robots
In order for users with physical limitations to operate these robots, their interfaces must be accessible and cater to the specific needs of all users. As physical limitations vary amongst users, it is difficult to make a single interface that will accommodate all users. Instead, such interfaces should be customizable to each individual user.
In this work we explore the value of customization of a browser-based interface for tele-operating the Stretch RE1 robot. More specifically, we evaluate the usability and effectiveness of a customized interface in comparison to the default interface configurations from prior work. We present a user study involving participants with motor impairments (N=10) and without motor impairments, who could serve as a caregiver, (N=13) that use the robot to perform mobile manipulation tasks in a real kitchen environment.
Our study demonstrates that no single interface configuration satisfies all users' needs and preferences. Users perform better when using the customized interface for navigation, but not for manipulation due to higher complexity of learning to manipulate through the robot. All participants are able to use the robot to complete all tasks and participants with motor impairments believe that having the robot in their home would make them more independent.
Exploring Virtual Whiteboard Sessions in Mixed Hearing Environments
Project lead: Shaun Kalweit
Traditional ideation processes have been challenged due to current hybrid work environments and reliance on telecommunication tools. Our sponsor, Microsoft Teams, offers a platform for collaborative work, including brainstorming with whiteboards. However, these virtual sessions pose accessibility issues for D/deaf and hard of hearing (DHH) individuals. This project aims to address the challenges faced by DHH users of Microsoft Teams Whiteboard during remote meetings and develop a solution to enhance inclusivity and accessibility.
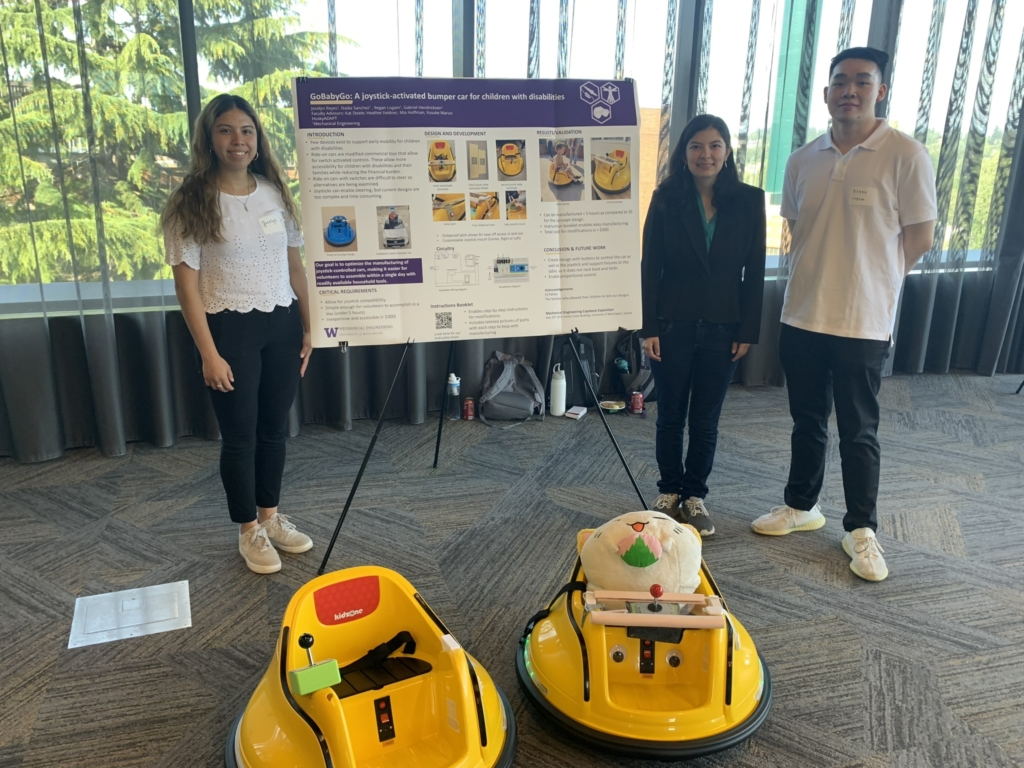
GoBabyGo Modification
Project lead: Nadia Sanchez
The student engineers on this team will redesign a joystick control modification to a ride-on car for young children as well as develop an easy-to-follow assembly manual in order to make it easier for the GoBabyGo volunteers to assemble.
How Do People with Limited Movement Personalize Upper-Body Gestures?
Project lead: Momona Yamagami
Biosignal interfaces that use electromyography sensors, accelerometers, and other biosignals as inputs provide promise to improve accessibility for people with disabilities. However, generalized models that are not personalized to the individual’s abilities, body sizes, and skin tones may not perform well. Individualized interfaces that are personalized to the individual and their abilities could significantly enhance accessibility.
Read more about Personalizing Upper-Body Gestures
In this work, I discuss how personalized electromyography gesture interfaces can be personalized to each user's abilities and characterize personalized gestures for 25 participants with upper-body motor impairments. As biosignal interfaces become more commonly available, it is important to ensure that such interfaces have high performance across a wide spectrum of users.
HuskyADAPT: Switch Kit
Project lead: Jordan Huang
The current switch kit has concerns regarding accessibility, safety, and durability. Our project seeks to modify and enhance a switch kit that enables children with disabilities to engage in collaborative play, providing a safe, enjoyable, and inclusive experience for all.
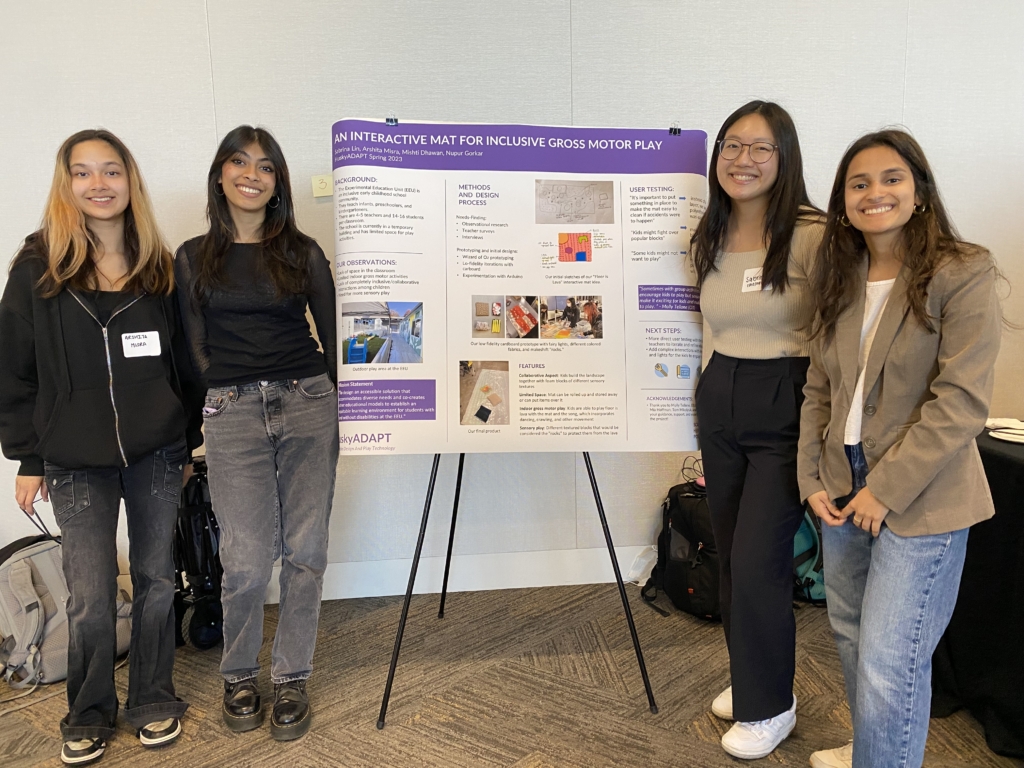
An Interactive Mat for Inclusive Gross Motor Play
Project lead: Sabrina Lin
Our mission is to design an accessible solution that will accommodate diverse needs and encourage inclusivity, in addition to co-creating other educational models to establish an equitable learning environment for students with and without disabilities at the Experimental Education Unit, an inclusive early childhood school community associated with the University of Washington. We focused on creating an interactive sensory mat for children to play “Floor is Lava,” encouraging them to further develop their gross motor skills and play collaboratively.
Notably Inaccessible – Understanding Data Science Notebook (In)Accessibility
Project lead: Venkatesh Potluri
Computational notebooks, tools that facilitate storytelling through exploration, data analysis, and information visualization, have become the widely accepted standard in the data science community both in academia and industry. While there is extensive research that investigates how data scientists use these notebooks, identifies their pain points, and enables collaborative data science practices, very little is known about the various accessibility barriers experienced by blind and visually impaired (BVI) notebook users.
Read more about Notably Inaccessible...
We present findings from a large scale analysis of 100K Jupyter notebooks, showing that BVI notebook users may experience accessibility barriers due to authoring practices, data representations in these notebooks, and the incapability of tools and infrastructures that are used to work with these notebooks. we make recommendations to improve accessibility of the artifacts of a notebook, suggest authoring practices, and propose changes to infrastructure to make notebooks accessible.
A Pilot Study of Sidewalk Equity in Seattle Using Crowdsourced Sidewalk Assessment Data
Project lead: Chu Li
We examine the potential of using large-scale open crowdsourced sidewalk data from Project Sidewalk to study the distribution and condition of sidewalks in Seattle, WA. While potentially noisier than professionally gathered sidewalk datasets, crowdsourced data enables large, cross-regional studies that would be otherwise expensive and difficult to manage.
Read more about Pilot Study of Sidewalk Equity...
As an initial case study, we examine spatial patterns of sidewalk quality in Seattle and their relationship to racial diversity, income level, built density, and transit modes. We close with a reflection on our approach, key limitations, and opportunities for future work.
Quantifying device and environment exploration during powered mobility use in toddlers
Project lead: Nicole Zaino
Toddlers with mobility disabilities and delays require the use of technology to access self-initiated mobility at an early age which is critical for development, mobility, and social interaction. My work is on investigating the toddler-device-environment relationship and interaction for toddlers learning how to navigate and explore with a pediatric powered mobility device (Permobil Explorer Mini).
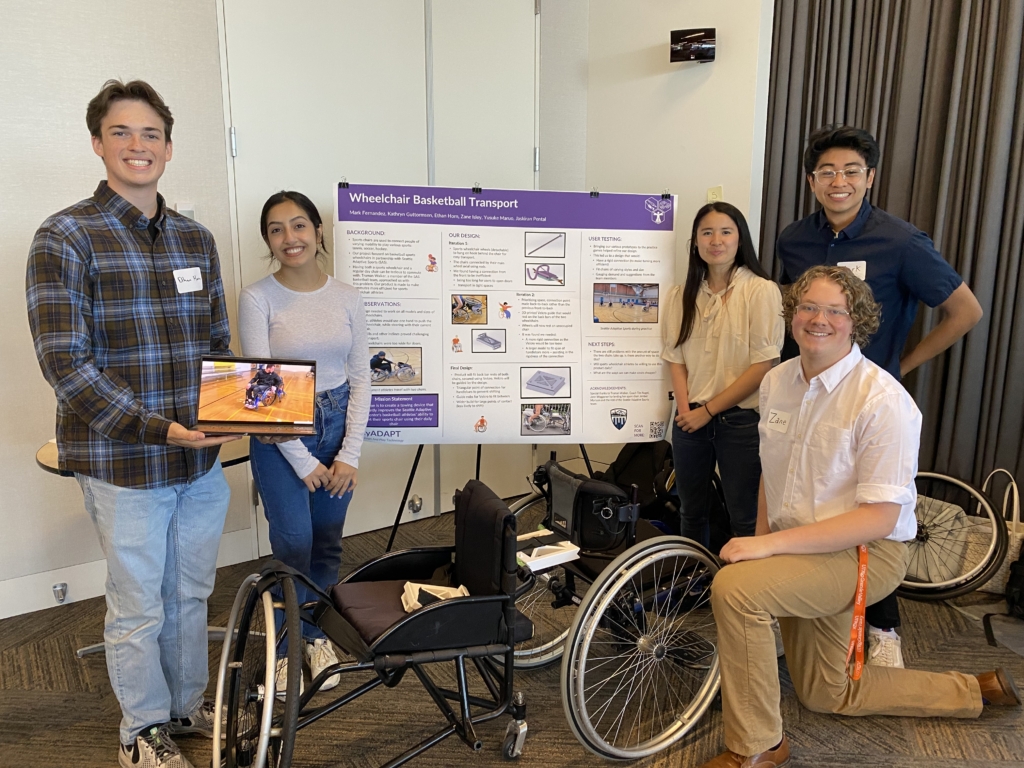
Sports Chair
Project lead: Yusuke Maruo
Our mission is to create a towing device that significantly improves the Seattle Adaptive Sports Center’s basketball athletes’ ability to transport their sports chair using their daily chair.
Steering Modifications to Support On-time Powered Mobility Use
Project lead: Kate Bokowy
Adapted ride-on cars are a great mobility learning tool for young kids with disabilities, but they can be hard to steer. We have created 3D-printed steering modifications to make it easier for a child to turn the steering wheel using different modalities.
Toward Open and Shared Pedestrian Path Network Mapping and Assessment at Scale
Project lead: Ricky Zhang
Manual mapping of pedestrian path networks is often a challenging task due to the substantial data requirements and potential errors. In response, we’ve developed AI-powered automated tools that integrate diverse types of globally-available data for proactive generation and analysis of pedestrian path and network data, with a keen focus on accessibility considerations. The resulting pedestrian path network data is represented in a standardized format per the OpenSidewalks data schema, making it readily usable in downstream routing and analytic applications.
Wireless Switch for Accessible Play
Project lead: Spencer Madrid
Our mission is to create a viable wireless switch that is more affordable than commercially available switches and is adapted to increase accessibility in any situation.
Classification of light rail stations using semantic segmentation
Project lead: Anat Caspi